




Agilis Quad
Agilis Quad
Agilis Quad



Please contact us via email for more information or to place an order.
Agilis Quad UAV System Specifications
-Size: 480mm
-Number of Motors: 4
-Propeller Diameters: 12” dia.
-Airspeed Range: 0-55 mph
-Flight Endurance: 20-28 minutes
-Payload Capability: 2 lbs.
Validus Quad
Validus Quad
Validus Quad




Please contact us via email for more information or to place an order.
Validus Quad UAV System Specifications
-Size: 750mm
-Number of Motors: 4
-Propeller Diameters: 18” dia.
-Airspeed Range: 0-50 mph
-Flight Endurance: 25 minutes
-Payload Capability: 6 lbs.
Validus Hex
Validus Hex
Validus Hex






Please contact us via email for more information or to place an order.
Validus Hex UAV System Specifications
-Size: 900mm
-Number of Motors: 6
-Propeller Diameters: 18” dia.
-Airspeed Range: 0-50 mph
-Flight Endurance: 25 minutes
-Payload Capability: 12 lbs.
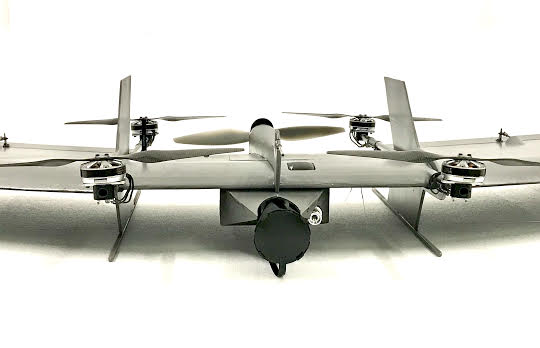
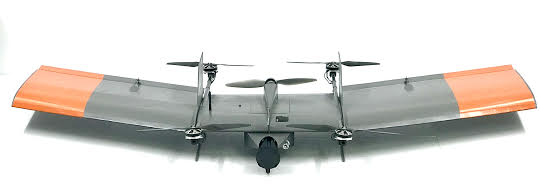
Primus Air
Primus Air
Primus Air



Please contact us via email for more information or to place an order.
Primus Air UAV System Specifications
Size: 76” Wingspan
-Number of Motors: 5
-Propeller Diameters: 12” dia.
-Airspeed Range: 0-90 mph
-Flight Endurance: 40-60 minutes
-Payload Capability: 5 lbs.
The Theiss PRIMUS AIR is a hybrid design that is a five-motored flying wing, where four motors are used for vertical take-off, landing, and hovering as a quadcopter, then the fifth motor is used for forward flight. This configuration gives the ability to launch and recover from small areas, hover, yet have a high sprint speed and the efficiency of a fixed wing aircraft.
In addition, the PRIMUS AIR allows for autonomous flights via GPS Waypoints that can be preprogrammed before flight, or may be altered or changed during flight through the ground control system. The system also offers a “return to home” safety feature when manually commanded by the operator, or if communication is lost between the UAV and the controller.